
Alternate Mapping: Transformed Value Minimum
The Fractal Science Kit fractal generator Alternate Mapping Transformed Value Minimum applies a transformation to each orbit point and the point with the minimum magnitude is used to determine the resulting value.
See also:
The Transformed Value Minimum properties pages are:
- Shape Transformation
- Transformation
- Properties
The Properties page supports several properties to control the results.
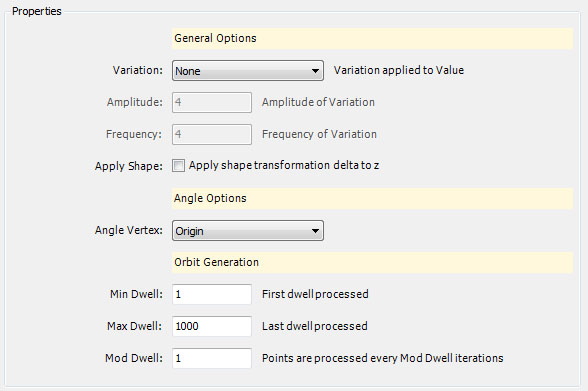
General Options
Before the orbit point P is passed to Transformed Value Minimum for processing, it is transformed by Transformation. When a point P is transformed, it is understood that P is passed through the transformation and the resulting transformed point placed back in P.
If Apply Shape is checked, we apply the Shape Transformation to the magnitude as well. This injects a simple orbit trap like quality into the value based on the shape defined by the Shape Transformation.
Next, Variation is applied.
Variation is one of:
- None
- Angular Wave
- Angular Bounce
- Radial Wave
- Radial Bounce
- Horizontal Wave
- Horizontal Bounce
- Vertical Wave
- Vertical Bounce
- XY Wave
- XY Bounce
Variation sets the wave/bounce transformation applied to the value. The amplitude/frequency of the wave/bounce are given by the Amplitude and Frequency properties. Both properties can be positive or negative but not 0.
Finally, the magnitude is used to determine which point P is kept as the minimum across all the points in the orbit.
The alternate point's Value is set to the minimum magnitude.
The alternate point's Angle is set to the angle of P based on the Angle Options (see below).
The alternate point's Index is set to the dwell value associated with P.
Angle Options
The alternate point's Angle is set to the angle of P based on the Angle Vertex property. The angle is defined by the vector from the Angle Vertex to P. Angle Vertex is one of:
- Origin
- Z Prior to Transformation
Origin is the point 0+0i. Z Prior to Transformation is the original orbit point value prior to applying the transformation.
Orbit Generation
The Orbit Generation section defines 3 properties: Min Dwell, Max Dwell, and Mod Dwell. These values control the set of orbit points that are considered when processing the orbit. Min Dwell is the 1st dwell to check. Max Dwell is the last dwell to check. Mod Dwell - 1 is the number of dwells to skip between checks. That is, a dwell is processed if the dwell is between MinDwell and MaxDwell inclusive, and (dwell - MinDwell) % ModDwell = 0.